Resuelve el siguiente problema de conexidad 1
Considera:
$$\begin{align}&CS^2 (R)=R^2∖Δ\end{align}$$el espacio de configuraciones seguras de dos robots A y B moviéndose en una línea. Observa la ilustración:
para que recuerdes cuál es este espacio.
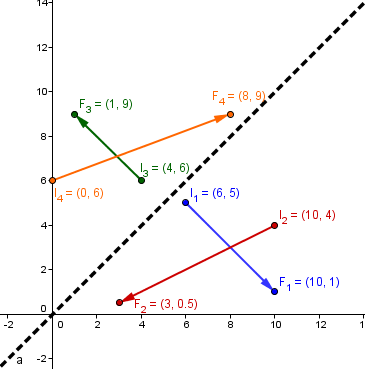
Para cada uno de los siguientes casos dibuja un segmento de línea en :
$$\begin{align}&CS^2 (R)\end{align}$$que represente la situación y el traslado descrito. Utiliza la notación:
$$\begin{align}&(I_A,I_B) \end{align}$$para la posición inicial de los robots y:
$$\begin{align}&(F_A,F_B) \end{align}$$para la posición final.
1.- El robot B está a la izquierda del robot A y se mueven en direcciones opuestas, alejándose uno del otro.
2.- El robot B está a la izquierda del robot A y ambos se mueven a la izquierda. El robot B avanza más que el robot A.
3.- El robot A está a la izquierda del robot B y se mueven en direcciones opuestas, alejándose entre ellos.
4.- El robot A está a la izquierda del robot B y ambos se mueven hacia la derecha. El robot A se desplaza más que el robot B.