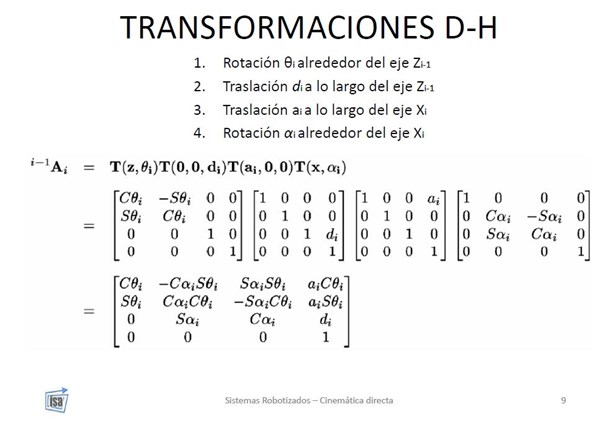
Matrices y geometría (transformación)
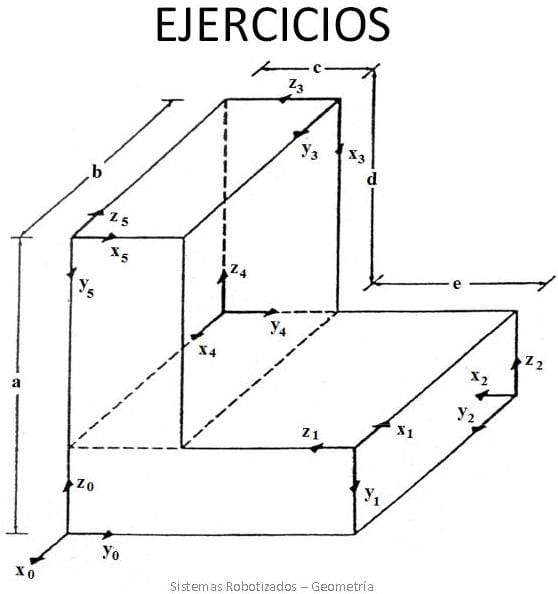
Quería pedirte ayuda para que me indicaras como sería la resolución de este ejercicio, ya que tengo un poco planteado el inicio de la resolución que hizo el profesor en clase, pero no se como continuar a partir de ese punto.

El profesor dijo que se podía resolver de dos formas diferentes, una desde el punto de vista del eje fijo y otra desde el punto de vista del eje móvil. Y que depende de la que elijamos tendremos que pre-multiplicar o pos-multiplicar.
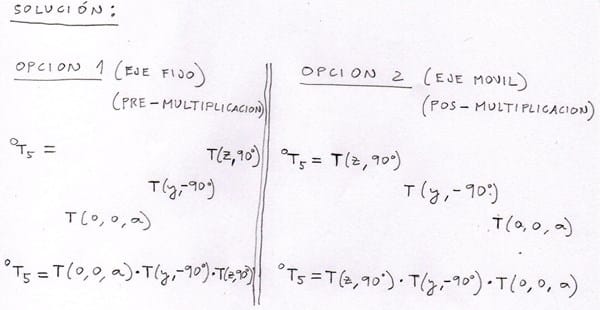
Llegados a este punto se que las dos 0T5 que he obtenido son validas para continuar, y debo elegir una para a partir de la función que tengo generar tres matrices que se multiplicaran, pero no se como generarlas con los datos que tengo.
Aunque si se que para ello debo de utilizar lo siguiente:
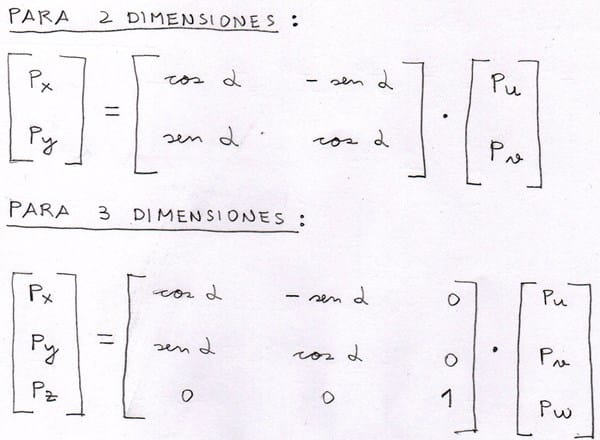
Se que el ejercicio es bastante largo, pero me podrías indicar como se continuaría a partir de este punto??